[Red.:] Ersterscheinung Juni 2021 im Mittler Report Verlag, Wehrtechnischer Report „Mobilität für Landstreitkräfte.
Unbemannte Systeme haben in der Luft seit Langem ihren festen Platz in militärischen Einsätzen gefunden – auch bei der Bundeswehr. Verstärkt werden jetzt auch landbasierte unbemannte Systeme gefordert, sei es für die unbemannte Aufklärung, die Unterstützung der infanteristischen Truppen beim Materialtransport oder für den teilweise unbemannten Konvoi auf der Straße. Dieser Artikel gibt einen Überblick über die aktuell in der Bundeswehr eingesetzten unbemannten Systeme, fasst die Dokumentenlage für die Weiterentwicklung zusammen und stellt eine Auswahl von laufenden Forschungsvorhaben und Projekten zum Thema Landrobotik vor.
Zivile Unternehmen mit Tesla, Daimler oder VW sowie neue Player wie Uber, Argo AI oder Waymo forschen aktiv seit einigen Jahren auf dem Gebiet der Automatisierung von Fahrzeugen. Dabei konzentrieren sich die Aktivitäten auf den öffentlichen Straßenverkehr mit seinen befestigten Straßen. Diese Entwicklungen lassen sich nur begrenzt auf militärische Anwendungen übertragen, da Fahrzeuge im militärischen Kontext oft auch im unwegsamen Gelände ohne feste Infrastruktur eingesetzt werden. Starke Erschütterungen und Umwelteinflüsse wie Schlamm, Staub und Niederschlag erschweren dabei die automatisierte Navigation. Zudem muss das System in militärischen Anwendungen auch ohne GPS navigieren können und sollte – um Entdeckung zu vermeiden – möglichst auf aktive Sensoren verzichten.
Unbemannte Landsysteme in der Bundeswehr: Eingeführtes Gerät und Forschung
Wegen dieser hohen Anforderungen an die Automatisierung im unstrukturierten Gelände werden die aktuell in Nutzung befindlichen, militärischen unbemannten Landsysteme in der Bundeswehr ferngesteuert. Primär werden solche Systeme zur Kampfmittelbeseitigung (tEODor und Packbot EOD) oder zur Minendetektion (z. B. das German Route Clearance Package) eingesetzt. Neben diesen Systemen unterstützt das kürzlich eingeführte System RABE (Roboter zur Aufklärung, Beobachtung und Erkundung im Ortsbereich) die Soldaten bei der Aufklärung. Dieses ferngesteuerte und sehr leichte (ca. 3,5 kg) System liefert bei abgesessenen Operationen abbildende Aufklärungsergebnisse in Echtzeit.
Im Bereich F&T (Forschung und Technologie) der Bundeswehr werden für den Materialtransport per Lkw die Möglichkeiten der Automatisierung im Rahmen verschiedener Studien untersucht. Ziel ist es, langfristig bei gleichem Personalansatz eine Erhöhung der Transportkapazitäten zu erreichen. Außerdem kann bei einem teilweise unbemannten Konvoi die Gefährdung von Soldaten reduziert und eine Neuzuordnung des Personals für Kernaufgaben der Bundeswehr erreicht werden. Im BAAINBw werden daher durch das Referat U6.2 Beiträge zum (wahlweise) unbemannten Lkw im Rahmen von F&T-Studien erarbeitet. Hier dient der TULF (Technologieträger Unbemanntes Landfahrzeug) als Integrations- und Testplattform für verschiedene Untersuchungen und Entwicklungen zum unbemannten Fahren. Der TULF basiert auf einem Lkw vom Typ MAN HX58. Mit unterschiedlichen Sensoren (u. a. 3-D-Laserscanner, Radar sowie Hyperspektralkameras) wurden Untersuchungen zur Erkennung von Hindernissen und zur Klassifikation von Wegen für die automatisierte Navigation im unwegsamen Terrain durchgeführt. Die UniBw München verfügt mit den Fahrzeugen MuCAR-3 (VW Touareg) und MuCAR-4 (VW Tiguan) über zwei Pkw, die ebenfalls für die Entwicklung und die Experimente mit dem Schwerpunkt 3-D-Punkteverarbeitung, Stereosehen und Bildverarbeitung genutzt werden können. Die aktuellen Erfahrungen und Fortschritte all dieser Experimentalsysteme werden regelmäßig auf der militärischen ELROB (European Land Robot Trial) im direkten Vergleich zu anderen System gezeigt. Die ELROB ist eine internationale Leistungsschau für die neuesten Forschungen und Entwicklungen im Bereich unbemannter Systeme sowie die Plattform für die Demonstration aktuell am Markt verfügbarer Systeme. Die Szenare der ELROB werden in enger Zusammenarbeit mit den militärischen Nutzern entwickelt und in Kooperation mit dem Fraunhofer FKIE durchgeführt und bewertet. Sowohl der TULF als auch die Münchener Fahrzeuge nahmen in der Vergangenheit an den Szenaren für das Konvoifahren und den Materialtransport für Logistik und Ausrüstung (MULE – Multifunction Utility / Logistics and Equipment) erfolgreich teil.

Bild 1: Das Fahrzeug TULF navigiert selbständig bei der ELROB 2018 im Szenario „MULE“ (Quelle: Bundeswehr/Paulick)
Grundlagen für die weitere Planung von F&T und Projekten
In den konzeptionellen Grundlagendokumenten der Bundeswehr erleben unbemannte Systeme aktuell einen kontinuierlichen Bedeutungszuwachs. Während im Weißbuch zur Sicherheitspolitik und zur Zukunft der Bundeswehr von 2016 vor allem noch von unbemannten Luftfahrzeugen gesprochen wurde und „Autonome Systeme“ in der F&T verortet wurden, betont die Konzeption der Bundeswehr zwei Jahre später bereits die herausgehobene Bedeutung „unbemannter Systeme und ihre[r] Einsatzperspektiven […] für alle Domänen“. Mittlerweile sind automatisierte, unbemannte Systeme fester Bestandteil konzeptioneller und planerischer Vorgaben von der Zukunftsentwicklung bis hin zum Fähigkeitsprofil der Bundeswehr. Zuletzt fanden die automatisierten Systeme Einzug in die Mittelfristplanung und werden zunehmend durch Initiativen konkretisiert. Als ehrgeiziges Ziel sieht die Mittelfristplanung seit 2020 den technologisch anspruchsvollen „Aufbau einer Grundbefähigung zum (teil-) autonomen/unbemannten Fahren für Landfahrzeuge“ bis 2027 vor. Um dieses Ziel erreichen zu können, müssen vor allem die nationalen F&T-Aktivitäten in diesem Bereich intensiviert werden. In einem ersten Schritt wurde das Thema „Unbemannte Landsysteme“ daher im BMVg bereits zum „Strategischen Interessenfeld“ erklärt.
Zukünftig müssen jedoch auch moderne Wege gefunden werden, um die zuweilen disruptiv und exponentiell verlaufenden Innovationen in den Technologien „automatisiertes Fahren“ und „künstliche Intelligenz“ nicht nur geplant, sondern auch explorativ entwickeln zu können und für die Bundeswehr nutzbar zu machen.
Erhöhung der Transportleistung: F&T Vorhaben „Interoperabler Robotik Konvoi“
Bisherige F&T-Arbeiten haben gezeigt, dass die Integration der Drive-By-Wire-Fähigkeit in ein bestehendes Fahrzeug einen erheblichen Aufwand bedeutet. Bei der Umrüstung sollten die Aktoren für die Quer- und Längsregelung so verbaut werden, dass das Fahrzeug nach wie vor für einen menschlichen Bediener nutzbar bleibt. Im aktuell laufenden Vorhaben InterRoK (Interoperabler Robotik Konvoi) wird daher sehr früh Wert auf die Integration der Drive-By-Wire-Fähigkeit gelegt. Um eine hohe Wiederverwendbarkeit der F&T-Ergebnisse für spätere Beschaffungsprojekte zu erreichen, werden bei InterRoK die neueste Generation der Ungeschützten Transportfahrzeuge (UTF) verwendet. Diese aktuell in die Bundeswehr eingeführten UTFs basieren auf der neuen MAN HX2-Baureihe der Firma Rheinmetall MAN Military Vehicles (RMMV) und bieten durch das vollautomatisierte Getriebe und die elektrische Ansteuerung der Beschleunigung (E-Gas) ideale Voraussetzungen für die Drive-by-Wire-Fähigkeit.
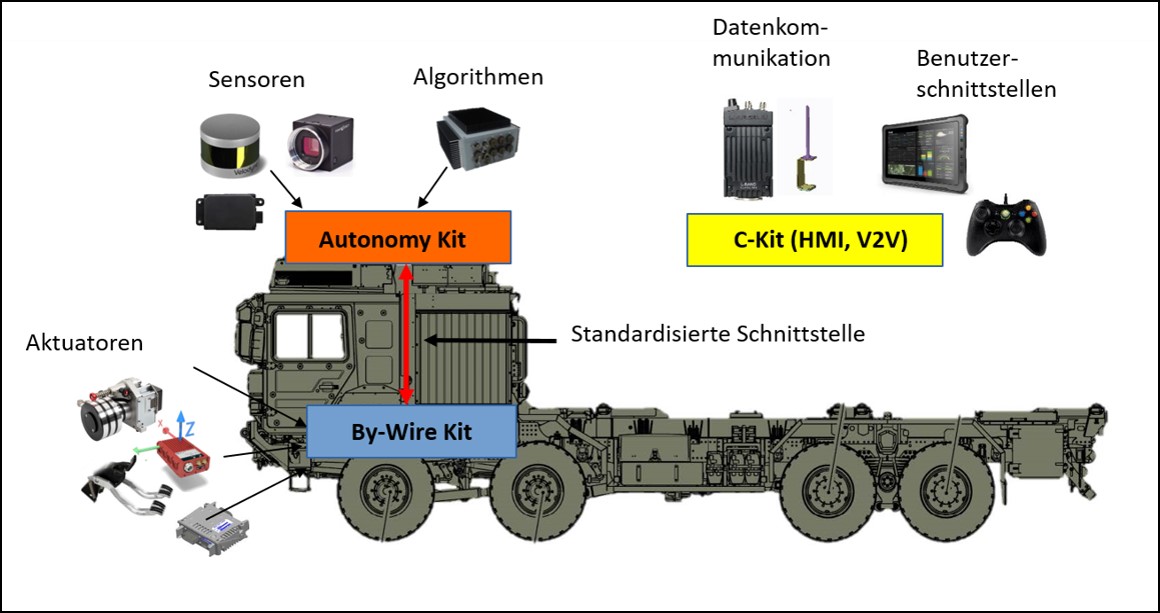
Bei InterRoK wird untersucht, wie ein unbemannter Konvoi aus verschiedenen Lkw der Bundeswehr (und perspektivisch auch aus Lkw unterschiedlicher Nationen) technisch realisiert werden kann (elektronische Deichsel). Das Konzept sieht einen militärischen Konvoi mit nur noch einem einzigen bemannten und geschützten Führungsfahrzeug vor, dem ein oder mehrere unbemannte Lkw folgen. Neben der Erweiterung zweier MAN HX2 um die Drive-By-Wire Aktoren (engl. By Wire Kit, kurz B-Kit) wird eine standardisierte Schnittstelle (IOP, Interoperability Profile) genutzt, über die mit dem B-Kit kommuniziert werden kann. Die Sensorik und die Intelligenz eines menschlichen Fahrers wird durch einen Autonomie-Satz (engl. Autonomy Kit oder kurz A-Kit) ersetzt, der über die IOP Schnittstelle mit dem B-Kit kommuniziert. Das A-Kit besteht aus Sensorik, Rechnern und der Software zur Wahrnehmung und Interpretierung der Umgebung, der Planung des Pfades sowie zur Quer- und Längsregelung des Fahrzeugs. Mit Hilfe des A-Kits ist der Lkw in der Lage, sich selbstständig auf Grundlage des Fahrauftrags und seiner Sensordaten zu bewegen. Der Einsatz der genormten Schnittstelle wird dabei den Austausch der A-Kits und die Nutzung der A-Kits auf verschiedenen Systemen erleichtern.
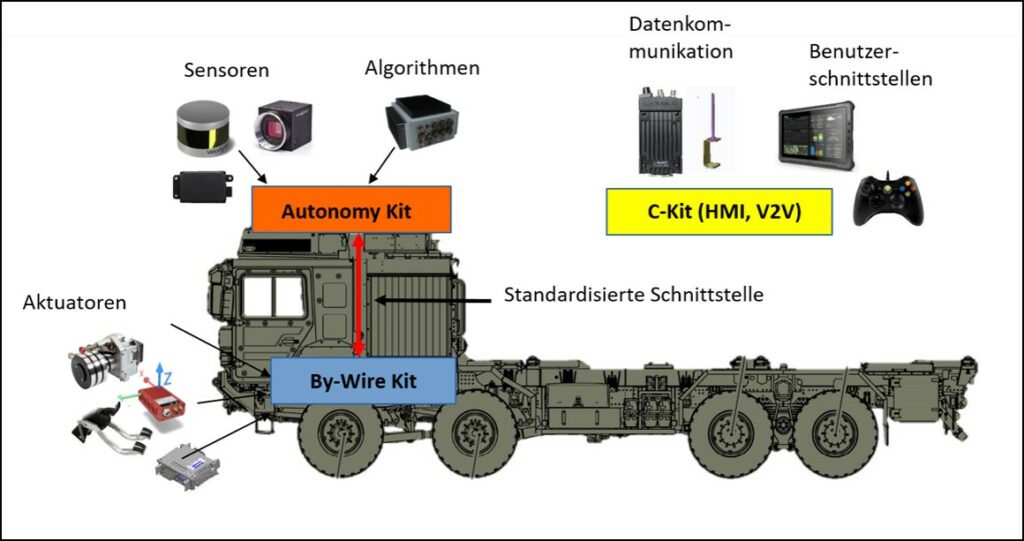
Bild 2: Modulare Architektur für unbemannte Systeme (Quelle: Bundeswehr/Retterath)
In einem ersten Schritt wird ein existierendes A-Kit vom Hersteller Robotic Research aus den USA in die deutschen Fahrzeuge eingebaut und erprobt. Diese A-Kits werden im Rahmen einer F&T Kooperation zwischen Deutschland und den USA für dieses Vorhaben von der amerikanischen Seite ausgeliehen. Die Entscheidung, im ersten Schritt diese amerikanischen A-Kits zu verwenden, basiert auf der fortgeschrittenen Entwicklung und erfolgreichen Erprobung der A-Kits auf der amerikanischen Seite sowie der engen Kooperation des BAAINBw mit der Dienstelle CCDC Ground Vehicle Systems Center (GVSC; ehemals TARDEC) der U.S. Army. Das GVSC arbeitet seit Jahren intensiv an einer unbemannten Konvoilösung. Es wurden bereits verschiedene Systeme erprobt, in denen die Leader-Follower Funktion implementiert wurde und zahlreiche praktische Versuche auf militärischen Übungsplätzen der USA durchgeführt. Aktuell werden von der U.S. Army im Rahmen des Expedient Leader Follower Programs 90 PLS (Palletized Loader System; Drive-by-Wire-fähige Logistikfahrzeuge) der Firma Oshkosh mit dem A-Kit von Robotic Research ausgerüstet und von der U.S. Army erprobt.
Im Anschluss an die Integration und die Tests der amerikanischen A-Kits sollen alternative A-Kits (z. B. von deutschen oder europäischen Herstellern) auf den Fahrzeugen getestet und verglichen werden. Neben dem Umbau der Fahrzeuge und der Integration der A-Kits mit den dazugehörigen Erprobungen, soll die Studie den Aufwand und das mögliche Optimierungspotenzial bei der Nachrüstung der deutschen UTF für die teilweise unbemannte Konvoifahrt liefern.
Außer diesen technischen Untersuchungen für das unbemannte Fahren im Konvoi müssen auch rechtliche Grundlagen betrachtet werden: Wie sieht es mit der Zulassung solcher Systeme für den öffentlichen Straßenverkehr aus? Wie können ethische Fragen zufriedenstellend beantwortet werden? Trotz möglicher Ausnahmereglungen für die Bundeswehr bei der hoheitlichen Aufgabenwahrnehmung müssen diese rechtlichen Grundlagen geklärt werden, bevor unbemannte Systeme eingeführt werden können.

Bild 3: Das neue UTF HX2 der Bundeswehr mit integriertem US A-Kit, von denen zwei in der F&T Studie InterRoK für den teilautomatisierten Konvoi verwendet werden (Quelle: RLS)
Erhöhung der Abstandsfähigkeit und Schutz des Soldaten: Entwicklungsprojekt „MoSeS – Mobiles Sensor-System“
Im Rahmen eines explorativen Projektes „Systemdemonstrator Mobiles Sensor-System (Systemdemonstrator MoSeS)“ soll in den Jahren 2020 und 2021 untersucht werden, wie ein unbemanntes mobiles Landsystem, das der Aufklärung von Personen, Fahrzeugen und anderen Objekten dient, technisch realisiert werden kann. Für den Systemdemonstrator MoSeS sollen weitgehend existierende Roboter-Plattformen verwendet werden. Um einen möglichst breiten Überblick zu erhalten, wird von bis zu vier Unternehmen jeweils ein Systemdemonstrator untersucht und angemietet, so dass der aktuelle Stand der Technik erfasst werden kann. Eine besondere Herausforderung stellt das geforderte geringe Gewicht für den mobilen Sensorträger dar.
Die Hauptkomponenten des Systemdemonstrators sind seine eigenbewegliche Einheit (der mobile Sensorträger) und seine Bedien- und Auswerteeinheit (BAE). Der mobile Sensorträger wird mittels Bedien- und Auswerteeinheit (BAE) gesteuert und überwacht. Hierfür muss die BAE dem Bediener die Möglichkeit bieten, den mobilen Sensorträger direkt zu steuern oder die zurückzulegende Strecke auf Grundlage von abzufahrenden Wegpunkten in eine elektronische Karte einzutragen. Für die Ausführung der Mission muss der mobile Sensorträger in der Lage sein, Wegpunkten teilautonom zu folgen. Dabei soll der mobile Sensorträger Hindernisse bei Tag und Nacht erkennen und automatisiert vermeiden. Das System muss dem Bediener die Möglichkeit bieten, Aufklärungsergebnisse ständig und verzugsarm zu betrachten. Die Untersuchungen der Systemdemonstratoren an der WTD 41 in Koblenz finden 2021 statt. Im Anschluss erfolgt die Ausschreibung für die Entwicklung des eigentlichen Systems MoSeS, die bis 2022 abgeschlossen sein soll. Ab 2023 soll dann der Bau und die Einführung der MoSeS Seriengeräte beginnen.
Entlastung im Gelände: Cargo-Mule
Ein weiteres Gebiet für den Einsatz von unbemannten Landsystemen ist die Unterstützung der infanteristischen Truppen mit Mehrzweck-Bodenfahrzeugen, sog. Cargo-Mule Systemen (von englisch mule für Maulesel). Der bisher genutzte Waffenträger Wiesel soll durch den größeren GTK Boxer ersetzt werden. Gerade aber für unwegsames und schwer zugängliches Gelände (z. B. im Wald) kann die Truppe den Boxer aufgrund seiner Größe nicht immer nutzen. Hier könnten kleinere und unbemannte Systeme (zwischen 400 und 1.000 kg) die Truppe bei Transportaufgaben, Überwachungsaufgaben oder dem Schutz der eigenen Soldaten helfen.
Die unbemannten Systeme sollen den Soldaten beim Tragen von schwerer Ausrüstung (persönliche Ausrüstung oder schwere Waffen wie z. B. die Granatmaschinenwaffe) unterstützen, sodass die Einsatzkräfte ausgeruhter und schneller am Zielort ankommen.
Diese Cargo-Mule-Funktionalität soll durch mittelgroße elektrobetriebene Systeme erreicht werden. Vorerst werden die Fahrzeuge noch ferngesteuert, zukünftig sollen sie dem Soldaten jedoch auch automatisiert folgen oder angelernte Wege zum Materialtransport selbstständig abfahren. Erste praktische Tests und Vorführungen mit drei Cargo-Mule Systemen unterschiedlicher Hersteller haben in Zusammenarbeit mit der Truppe und den Herstellerfirmen im Jahr 2019 am Ausbildungszentrum der Infanterie in Hammelburg erfolgreich stattgefunden. Eine Fortsetzung mit weiteren Systemen fand im Jahr 2020 auf dem Truppenübungsplatz Lehnin statt.

Bild 4: Soldat bei praktischen Tests mit einem Cargo-Mule System in Hammelburg 2019 (Quelle: Fraunhofer FKIE)
Zusammenfassung und Ausblick
Die Bundeswehr forscht intensiv an unbemannten Landsystemen sowohl im Bereich der unbemannten Lkw als auch im Bereich kleinerer Unterstützungssysteme. Ziel dabei ist der Schutz und die Entlastung des Personal, sowie die Erhöhung der Leistungsfähigkeit bei gleichem Personaleinsatz. Beispiele sind die F&T Studie InterRoK (Interoperabler Robotik Konvoi), um mittelfristig einen teilautomatisierten Konvoi zu realisieren. Dabei hängt der Zeitpunkt der Einführung der Systeme in die Bundeswehr – neben der technischen Umsetzung – auch von den rechtlichen Zulassungsvoraussetzungen ab. Noch vor der Einführung der unbemannten Lkw wird daher wohl die Cargo-Mule-Fähigkeit zur Verfügung stehen, also mittelgroße unbemannte Systeme für die infanteristische Truppe, die zunächst noch von einem menschlichen Bediener gesteuert werden. Dabei kann die Steuerung über eine Fernbedienung oder über Gesten erfolgen. Als nächstes unbemanntes mobiles Aufklärungs-System wird MoSeS eingeführt werden und die Abstandsfähigkeit bei der Aufklärung auch bei widrigen Wetterbedingungen (wenn fliegende Systeme nicht starten können) ermöglichen.
Insgesamt nimmt die Anzahl der Forderungen in der Bundeswehr nach unbemannten Landsystemen stark zu. Den Weg von Ergebnissen aus der F&T Stufe 2 hin zu einsatzfähigen Produkten zu gestalten wird die große Herausforderung in der Zukunft sein. Hier müssen in der Bundeswehr moderne Wege gefunden werden, um die zuweilen disruptiv verlaufenden Innovationen weiterzuentwickeln und schnellstmöglich für die Bundeswehr nutzbar zu machen.
Autoren: Johannes Pellenz, Arno Retterath und André Volk sind Angehörigen des Bundesamtes für Ausrüstung, Informationstechnik und Nutzung der Bundeswehr (BAAINBw) U6.2